















Imaging and Navigation for Surgical Robots
Imaging and navigation for surgical robots refers to the combination of advanced imaging technologies, such as CT, MRI, optical trackers, or ultrasound, with robotic navigation systems to support surgical procedures in real time. Imaging provides detailed anatomical information, while navigation systems use this data to guide the robot and track instruments during surgery.
Types of Imaging and Navigation for Surgical Robots
The following are key types of imaging and navigation technologies used in surgical robots.
Preoperative Imaging
- CT, MRI, and PET scans are widely used for surgical planning and simulation. These modalities are foundational in neurosurgery, oncology, and cardiac interventions, helping define anatomical targets and optimise robotic trajectories.
Intraoperative Imaging
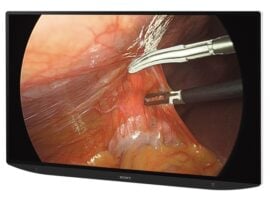
- Real-time imaging during surgery enhances precision and safety. Ultrasound is ideal for soft tissue procedures such as liver resections, kidney surgery, and thyroidectomy. Fluoroscopy is commonly used in orthopaedic and spinal surgeries for bone alignment and implant placement. Cone Beam CT (CBCT) is applied in dental and ENT procedures for compact, high-resolution 3D imaging.

Image Fusion and Registration
- Combines multiple imaging modalities (e.g., CT + PET or MRI + ultrasound) and aligns them with the patient’s anatomy. This technique supports brain tumour resections, prostate surgery, and head and neck oncology, enabling precise robotic targeting.
Augmented Reality (AR) Navigation
- AR overlays digital visuals onto the surgical field to enhance spatial awareness. It’s increasingly used in spinal instrumentation, craniofacial reconstruction, and laparoscopic procedures, allowing surgeons to visualise hidden structures in real time.
Optical and Electromagnetic Tracking
- These systems track instruments and robotic arms in 3D space using sensors and markers. Optical tracking is widely used in orthopaedic joint replacements and neurosurgical navigation, where line-of-sight is available. Electromagnetic tracking is preferred in ENT, bronchoscopy, and interventional radiology, where visibility is limited but spatial accuracy remains critical.
Near-Infrared Fluorescence Imaging
- Uses fluorescent dyes to highlight blood vessels, lymph nodes, or tumours. This modality is essential in oncologic surgery, sentinel lymph node mapping, and vascular bypass procedures to improve targeting.
Ultrasound-Guided Navigation
- Provides non-radiative, real-time guidance, especially valuable in soft tissue surgeries such as urology, hepatic resections, and minimally invasive abdominal procedures. It’s also used in interventional radiology for needle placement and ablation.
Integration of Imaging and Navigation in Surgical Robotics
Neurosurgery
- Robotic systems integrate MRI, CT, and intraoperative ultrasound with navigation platforms to guide instruments with millimetre precision.

Orthopaedic Surgery
- Orthopaedic robots combine preoperative CT scans, fluoroscopy, and optical tracking to plan and guide joint replacements, spinal fusions, and bone resections.
Spinal Surgery
- In spinal procedures, CT-based navigation, CBCT, and electromagnetic tracking are used to guide robotic instruments during pedicle screw placement and decompression surgeries.
Cardiac Surgery
- Cardiac robots integrate fluoroscopy, 3D echocardiography, and real-time ultrasound with navigation software to guide catheters and robotic tools during ablation, valve repair, or coronary bypass.
Liver and Kidney Surgery
- Robotic systems use ultrasound, CT, and fluorescence imaging to locate and remove tumours in hepatic and renal procedures.
Interventional Radiology
- In interventional radiology, ultrasound, CT, and electromagnetic navigation guide robotic needles or catheters for biopsies, ablations, and targeted drug delivery.

