

A team of engineers from Carnegie Mellon University brought together to achieve an autonomous reaming solution to the total hip arthroplasty surgery.

A successful automated system was brought to life through a partnership between Carnegie Mellon University and Smith & Nephew
The Hipsters are a team of engineers and master’s students in robotics at Carnegie Mellon University, having diverse backgrounds and skills, and were brought together to work on a unique project of automation in the medical industry. With a partnership between Carnegie Mellon University and their principal sponsor Smith & Nephew, the project’s objective became the design of an autonomous system for total hip arthroplasty (THA) surgery. This project will enable them to develop new skills and take on something unique while being passionate about medical robotics.
“Smith & Nephew helped us in our project by providing us with all the resources that we needed and also the mentorship from time to time.” Sundaram Seivur, Trajectory Planning Lead in the Hipster at CMU
A complementary automated system to assist the surgeons

The THA surgery involves multiple steps for the surgeon to achieve. To know what operation to automate, the Hipsters needed to understand what the full THA surgery consisted of, so their automated system can match all surgeon and doctors’ requirements. The fact that It is imperative for surgeons to understand the depth and orientation of the acetabulum they are reaming led the Hipster to automate the reaming of the acetabulum (pelvis). It is an essential step in THA Surgery, it represents a complicated task for the surgeon and it is the first system of its kind in the academic world.
ARTHuR the Autonomous Reaming for Total Hip Replacement robot
To automate the reaming of the acetabulum and to meet the need of placing the cup accurately into the acetabulum, in the proper depth and orientation, the Hipsters are proposing the ARTHuR robot (Autonomous Reaming for Total Hip Replacement) which will maximize the accuracy of acetabular reaming, and performance of the operation by remaining robust during surgery.
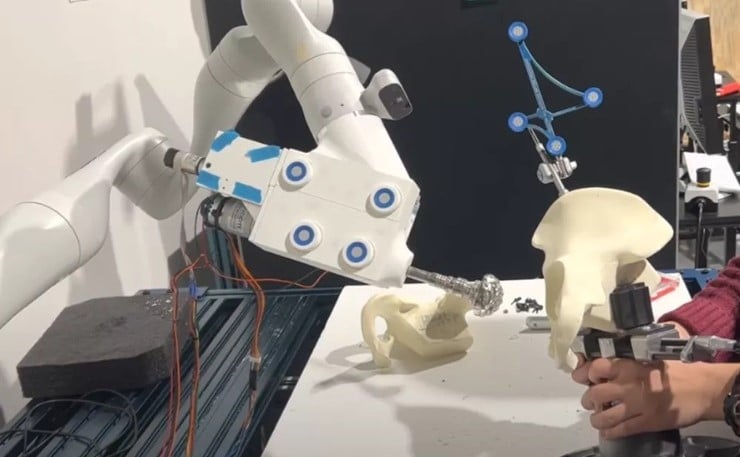
The system uses a surgical plan that informs the system where to remove bone from the acetabulum and where to place the acetabular cup. Before surgery, reflective markers on a probe and the robotic arm’s camera are used to localize and register the pelvis’s position and identify the arm’s end-effector. The surgeon can then move the robotic arm to the site of surgery and the robot arm executes a trajectory while maintaining force and velocity constraints.
An autonomous, simple & reliable solution

A user-friendly and reliable autonomous system uses Kinova‘s Gen3 robot arm to ream the acetabulum without human intervention. The system includes a controller that prevents edge cases and avoids singularities in the arm, and the user interface simplifies interaction with the system. Surgeons can stop the operation at any time and have full control of the robot arm if needed. The surgeon doesn’t necessarily need to have any robotics knowledge to operate the system.
A collaboration between Kinova and the Hipster from Carnegie Mellon University
Kinova was glad to collaborate in the Hipster team’s automation project by supplying them with a Gen3 robot arm. Gen3 had a well end-to-end compatibility with their robot operating system, high level functionalities that the Hipsters could build features on top. They really like the fact that Gen3 is very widely documented and comes with a well supported community.
“ Gen3 robot arm played a pivotal role in making our system possible and realizing our goals” Sundaram Seivur, Trajectory Planning Lead in the Hipster at CMU



